Handling Harmonics With AC Drives
However, as drives are boosting production, they might also be contributing to electrical noise problems, such as line current harmonics.
What Are Harmonics?
Harmonics are deviations from the sinusoidal fundamental AC line voltage and current. Most electrical power in North America operates at a frequency of 60 Hz. A harmonic frequency is an integer multiple of this fundamental frequency. So in a 60-Hz system, the second harmonic would be 120 Hz, the third would be 180 Hz, and so on.When any harmonic is added to the sinusoidal fundamental current or voltage, the result is distortion. The greater the amplitudes of the harmonics present, the greater the distortion in the electrical waveform. Very simply, whenever a voltage or current does not look like a perfect sinusoidal waveform, it contains harmonics.
Compared to DC motor drives, AC motor drives cause very few problems. However, poorly designed applications can result in power line voltage distortions, as shown in the flat-topped waves of Figure 1. These voltage distortions can cause problems for other equipment connected to the same power lines, resulting in erratic operation of controls, dimming of lights, audible noise on phone systems, and static on AM and FM radios.
The distribution transformers and cables feeding these drives will also experience additional heating, which reduces the power utilization of those components.
What Causes Harmonics
Unlike an AC motor operating across the power line (Figure 2), the current drawn from a distribution transformer feeding a typical AC drive is far from a sinusoidal waveform. (See Figure 3.) This occurs because the drive is taking current from the transformer only during certain times of the cycle, to convert the AC line voltage to a fixed DC voltage within the drive.The drive pulse-width modulates this fixed DC voltage into variable frequency, variable voltage for the motor. The AC to DC conversion causes the harmonics. Current flows only during part of the cycle and is off during other parts of the cycle, creating the odd-looking current waveform (Figure 3). This distorted current creates the voltage distortion.
As the number of drives employed in automation systems grows, so too does the misconception that drives are the only piece of the puzzle to harmonic problems. While they may comprise a sizable portion of nonlinear loads, they are only one element in the harmonic equation.
That’s why it’s important to analyze all electrical loads that could potentially cause problems for a system before making your final conclusions.
Looking for quick answers on air conditioning, heating and refrigeration topics? Try Ask ACHR NEWS, our new smart AI search tool. Ask ACHR NEWS
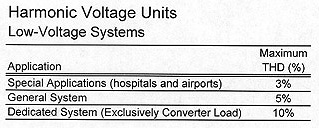
How Much Is Too Much
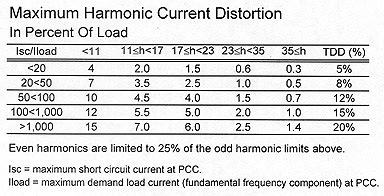
When other equipment is connected to secondary power terminals, voltage distortion may cause improper operation of the other equipment. So, how much current harmonic distortion will cause a problem? The Institute of Electrical and Electronic Engineers (IEEE) Std. 519-1992 recommends maximum current distortion levels caused by nonlinear loads to limit the voltage distortion they would create, minimizing the likelihood of equipment failure due to those harmonics. Tables 1 and 2, reproduced from the IEEE standard, illustrate the limits applicable for most typical drive systems.To predict if a particular plant or system consisting of drives, motors, heaters, lights, and other equipment may have problems, only three pieces of information are needed:
1. Isc, short-circuit current of the transformer feeding the system:
Isc = kVA x 1,000/(Vsec x 1.732 x Z)
Where kVA is the rating of the transformer feeding the system, Vsec is the secondary line-to-line voltage of the transformer, and Z is the decimal impedance of the transformer (in other words, 5.3 percent translates to 0.053). All of this information is typically found on the transformer nameplate.
2. Ifund, total fundamental current load on the transformer: The fundamental current of a drive is typically 1.1 x hp for a 460-V drive. The fundamental current of a motor running across the line is typically 1.2 x hp for a 460-V motor. The fundamental current of a 460-V linear load is 1.25 x kW. Simply double the values for 230-V systems. Add all of these fundamental currents together to obtain a total fundamental current at maximum load.
Take the ratio of Iharm/Ifund to obtain the current Total Demand Distortion (TDD). This is the harmonic current divided by the fundamental current or the total harmonic distortion at maximum load.
Next, find the Isc/Iload ratio by taking Isc/Ifund. Go to Table 1 and find the corresponding range in the left-hand column titled Isc/Iload. Then see if the calculated TDD is less than or equal to the right-hand column of the TDD values listed in that table for that Isc/Iload ratio. If the calculated TDD is less, than there should be no harmonic issues at that site.
What Affects Harmonic Current
The harmonic current created by the drive can be affected by the presence of a DC link choke, the DC bus capacitance, and the line inductance between the drive input and its source of voltage (such as transformer inductance, cable inductance, and additional line reactors).For example, the current harmonics created by the drive will flow through line inductors, creating voltage harmonic distortion. The closer you are to the drive, the greater the voltage harmonic distortion. This is why the voltage distortion is greater at the drive than at the transformer.
If other equipment needs to be connected to the same transformer as the drive, connect the other equipment as close to the transformer as possible. This will minimize the effect of current harmonics produced by the drive on the voltage waveform, which can cause problems with the other equipment.
There are several methods and products to reduce the line current harmonics created by drives. Cost is not the only factor that distinguishes one solution from another. Even though the addition of line reactors or passive filters can help reduce current harmonics, they also reduce the DC bus voltage within the drive at full-speed, full-load conditions. This prevents the drive from being able to provide full power to the motor, limiting the power out of the motor to about 95 percent of its nameplate rating.
Why would you install a 100-hp motor, only to have its capability limited to 95 hp, especially under peak demand conditions? This is why multipulse solutions are a better fit for most situations; no derating is necessary, and it is less expensive than other mitigation methods.
The goal for those specifying harmonic mitigation solutions is to combine the most cost-effective solution for the particular drive and power distribution system. Since several factors come into play in determining the harmonics in the drive system, you need to consider all factors before arriving at a final recommendation.
Rick Hoadley is the technical program manager in the Custom and Configured Drives Group at Rockwell Automation, Mequon, Wis. He has been active in the development and application of adjustable-speed drives for more than 28 years.
Publication date: 04/21/2003
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!




